






Studio e realizzazione del natante drone per rilievo batimetrico di canali di bonifica
1 - Premessa
Per le attività di tutela ambientale esercitate dal Consorzio di Bonifica assume un ruolo importante la conoscenza della sezione e profilo dei canali addetti al trasporto delle acque di scolo ed irrigazione; questi subiscono nel tempo sollecitazioni meccaniche ed idrauliche che ne modificano la sezione riducendone l’efficienza. Di seguito si citano alcuni casi:
• è frequente il caso di canali che si sviluppano parallelamente a strade trafficate; le sollecitazioni meccaniche prodotte dai mezzi pesanti innescano cedimenti;
• il riempimento totale del canale e svuotamento repentino, crea sollecitazioni idrauliche che deteriorano la consistenza spondale dei canali non rivestiti;
• la presenza di eccessiva vegezione può creare ostruzioni e rallentamenti del flusso, a tale scopo i canali vengono periodicamente sfalciati
• il trasporto solido può creare accumuli fondali tali da ridurne la sezione
Per avere la situazione sotto controllo è necessaria l’azione di monitoraggio della rete, che è più complessa per la parte immersa del canale e normalmente richiede l’utilizzo di una squadra composta da due persone su una imbarcazione a fondo piatto (uno addetto al movimento dell’imbarcazione e un tecnico rilevatore) più due ulteriori unità di personale disposte una per sponda del canale.
Allo scopo di ridurre i costi e migliorare l’efficienza del rilevamento è stato progettato e costruito un natante drone dotato di sonar. Il natante drone è stato gradualmente migliorato nel sistema di movimento, nel peso complessivo e nella strumentazione di guida e trasmissione dati. L’attività del natante nella sua prima configurazione è iniziata nel 2014, nell’attuale configurazione (luglio 2016) è in grado di essere gestito da un solo tecnico e di effettuare sei ore di rilevamento continuativo.
2 – Studi iniziali e prima realizzazione
Per ottenere la massima stabilità e perpendicolarità nel lancio degli impulsi sonar, si è scelto di installare uno strumento sonar single beam in uno scafo con configurazione a catamarano, nello spazio fra i due galleggianti. Per avere l’esatta indicazione della coordinata planimetrica del punto batimetrico rilevato è stato installato un GNSS ad alta precisione del tipo Hyper Pro, in seguito sostituito con il più moderno Gr5. L’imbarcazione è in grado di trasmettere via radio i dati rilevati ed elaborati in tempo reale da un computer di bordo, fornito e configurato dalla ditta Si2G di Ancona. Per la propulsione è stata scelta un’elica aerea intubata in modo da non avere problemi alle eliche immerse dovuti all’eventuale presenza di vegetazione in alveo o detriti galleggianti.
Il natante drone si è rivelato in grado di effettuare le sue prime azioni di rilevamento su alcuni canali di bonifica, ma sono subito emersi alcuni difetti sui quali si è dovuto lavorare, tenendo ben presnte i limiti di spesa, per ottenere maggiore affidabilità ed efficienza.
Il dato rilevato era attendibile ma il natante drone presentava i seguenti problemi:
• peso eccessivo
• problemi di fix al GNSS (ricezione satelliti per individuazione della posizione)
• problemi di navigazione (manovrabilità insufficiente)
• autonomia di sole due ore
• difficoltà di messa in acqua e recupero con un solo tecnico.

Figura 1 – Prima configuarazione. Fra i due galleggianti è posizionato l’eco scandaglio. Il radiocomando, il computer e la trasmittente dei dati sono contenuti nella scatola a tenuta stagna di colore nero. A poppa è visibile il sistema propulsivo, costituito da un’elica aerea intubata, subito a valle di questa è visibile il timone aereo di direzione di colore nero.
La calibrazione e messa a punto di ogni componente del sistema (GPS – Sonar – SW di gestione – imbarcazione) ha richiesto numerosi test di prova eseguiti dal Settore Sistema Informativo Geografico, che hanno portato a modifiche delle singole componenti per arrivare alla funzionalità richiesta.
Un problema che ha trovato soluzione solo nell’aprile 2016 è stato la perdita di manovrabilità in presenza di acqua in movimento e/o ventosità (anche moderata). Il problema si generava per via del peso complessivo della strumentazione che creava una eccessiva inerzia alle variazioni di moto. Nella configuazione iniziale, la virata era prodotta dalla azione propulsiva dell’elica aerea e dal timone di direzione non immerso ma solidale al cilindro che intuba l’elica propulsiva nel flusso della quale esso lavora. Ai bassi regimi, il momento di forze prodotto dal flusso d’aria prodotto dall’elica aerea sul timone è insufficiente per effettuare la virata; per ottenerla si è sperimentato che è necessario azionare l’elica aerea a velocità sufficientemente alta, con conseguente alta richiesta di energia e conseguente riduzione dell’autonomia.
Il problema dell’autonomia diventa più significativo se si considera il fatto che vi sono canali con pochi punti adatti per la messa in acqua e recupero del natante.
Per ovviare al problema era stata presa in considerazione la propulsione con motore a scoppio,ma questa, pur avendo meno limiti di autonomia presenta rischi di spegnimento, difficile regolazione della spinta propulsiva, pesi eccessivi, e soprattutto produce oscillazioni dovute alle masse in movimento (pistone, biella e manovella); per questi motivi si è scelto di confermare la propulsione elettrica.

Figura 2 – Navigazione in forte presenza di vegetazione superficiale. Il natante è in grado di compiere le rilevazioni batimetriche senza impedimenti grazie al sistema propulsivo con elica e timone aereo.
3 – Sostituzione scafo e sistema propulsivo
La configurazione ottenuta in seguito agli interventi realizzati dalla ditta Te.Ma. di Imola, nel marzo 2016 ha risolto buona parte dei problemi. Di seguito vengono elencati i principali interventi eseguiti:
• riduzione dei pesi e degli ingombri con la completa sostituazione dei galleggianti con galleggianti più piccoli e leggeri, dotati di vano interno per aspitare le batterie, i servomeccanismi e i motori;
• raddoppio delle batterie;
• aggiunta di un sistema propulsivo composto due eliche immerse (una per ciascun galleggiante) da utilizzare in alternativa al sistema ad elica aerea;
• sostituzione dell’elica aerea intubata con due eliche aeree coassiali in plastica non intubate, in grado di aumentare il rendimento propulsivo.

Fig. 3 – Scafo visto dall’alto, con aperture per gli alloggiamenti stagni delle apparecchiature.

Fig. 4 – Natante drone del CBPF nella configurazione di marzo 2016.
La scelta di dotare il natante di due sistemi propulsivi era certamente poco convenzionale, si trattava di una strada nuova e che non era stata sperimentata con analoghe realizzazioni. Se da un lato avrebbe reso più pesante e complesso il natanate drone, dall’altro avrebbe consentito di disporre di un sistema propulsivo alternativo di maggiore rendimento, che si è rivelato all’atto pratico in grado di risolvere i problemi di manovrabilità ed autonomia del natante drone.
Dalle prime prove di navigazione, sulla base dei diversi livelli di consumo dell’energia delle batterie, è emerso che il rendimento propulsivo del sistema con eliche immerse è più che doppio rispetto quello con elica aerea. Per quanto riguarda la virata, si è scelto di non usare il classico sistema con timone immerso, ma di effettuare la virata con la sola azione delle due eliche, poste al termine dei due galleggianti, variandone le rispettive velocità in funzione del tipo di virata che si desidera ottenere. Mettendo in moto le due eliche immerse in marcia opposta, si è verificato che il drone è anche in grado di girare su sè stesso mantenendo pressochè fermo il suo centro di massa.
Di seguito sono elencate le caratteristiche del natante drone nella nuova configurazione
• Propulsione elettrica composta da due sistemi alternativi di eliche: n.2 eliche immerse (una per ciascun galleggiante), n.2 eliche aeree coassiali a grande diametro.
• 8 h di autonomia (variabile a seconda della velocità)
• Velocità massima di 20 km/h con propulsione ad eliche immerse
• Elettronica e batterie accolte all’interno degli scafi
• Ecoscandaglio Sonar single beam
• Rilevatore satellitare di posizione GNSS centimetrico Gr5
4 – Modifiche effettuate nell’aprile e nel luglio 2016
A seguito di un incidente alle eliche durante una azione di rilevamento, nell’aprile 2016 ne sono state modificate le installazioni, facendole lavorare in uno spazio protetto ottenuto mediante la modifica della parte terminale dei galleggianti. Contestualmente è stato potenziato il sistema di telecomando, consentendo al pilota di cambiare il sistema di propulsione direttamente da telecomando con il natante drone in navigazione.
Nel luglio 2016, presso il laboratorio del Settore Sistema Informativo Geografico, sono stati ridotti i pesi complessivi del natante grazie alla sostituzione della sovrastruttura in ferro con una identica struttura in alluminio. Il peso complessivo si è attestato a soli 25 kg (peso consentito per normativa per lo spostamento del natante da parte di una sola unità di personale).

Fig. 5 – Scafo visto da poppa. In basso nella foto si notano le nuove rientranze per le due eliche (laboratorio Te. Ma - Imola).
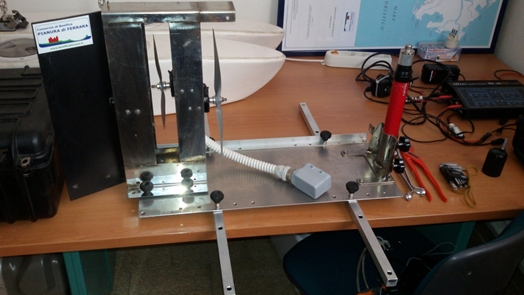
Fig. 6 – Nella foto è visibile la parte della struttura che è stata ricostruita in alluminio, allo scopo di ridurre i pesi del natante drone (laboratorio Settore Sistema Informativo Geografico - Ferrara).
5 – Futuri sviluppi
Presso il Settore Sistema Informativo Geografico è allo studio un sistema per facilitare la messa in acqua e il recupero del natante.
Si prevede l’installazione di una fotocamera digitale ad alta risoluzione, con servomeccanismo di brandeggio allo scopo di effettuare filmati e foto dell’intradosso dei ponti ed altri manufatti trasversali ai canali di bonifica. Il natante drone, per via dei suoi ridotti ingombri, si presta meglio delle imbarcazioni a remi o a motore con equipaggio per i rilevamenti di manufatti che si elevano di poco rispetto alla superficie dell’acqua (luce ridotta); è altresì preferibile per rilevamenti in canali con basso fondale per via del ridottissimo pescaggio (15 centimetri).

Fig. 7 – Imbarcazione “classica” per il rilievo batimetrico con due persone di equipaggio.